Livox Mid-360 3D LiDAR

How to setup?
-
From the User-Manual page10 connection part, setup the Network.
static IP address of the computerto 192.168.1.50 // Netmask as 255.255.255.0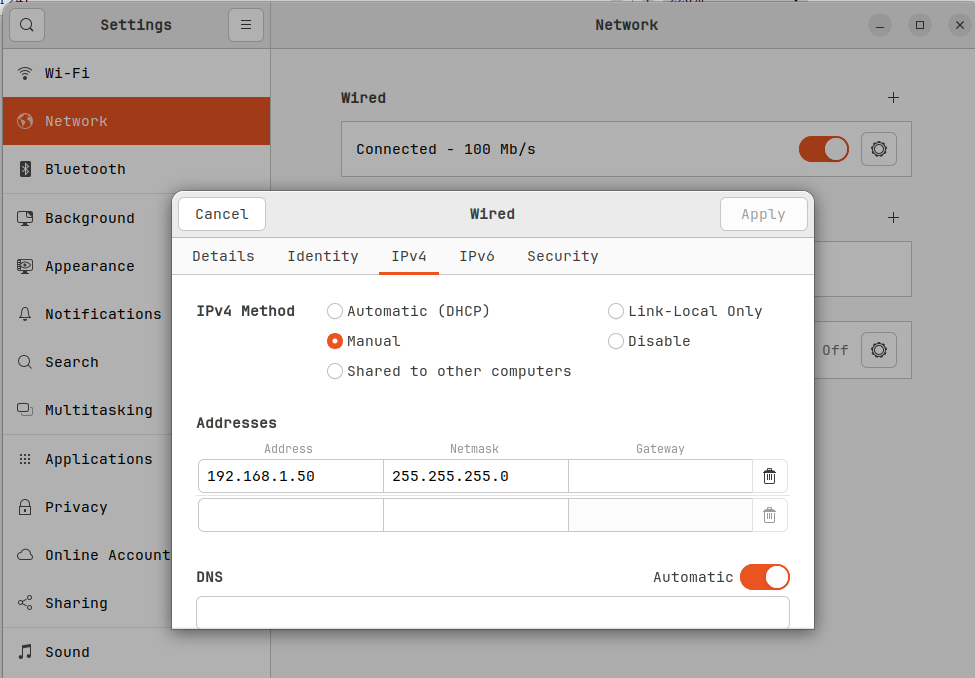
-
Follow the instruction at the livox_ros_driver-github.
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
-
Check the Serial Number. And last two digit used for the LiDAR ip address.
For example192.168.1.1xx -> 192.168.1.158
-
Update IP address inside the config file(MID360_config.json)
~/ws_livox/src/livox_ros_driver2/config (master*) » vim MID360_config.json{ "lidar_summary_info" : { "lidar_type": 8 }, "MID360": { "lidar_net_info" : { "cmd_data_port": 56100, "push_msg_port": 56200, "point_data_port": 56300, "imu_data_port": 56400, "log_data_port": 56500 }, "host_net_info" : { ## update here "cmd_data_ip" : "192.168.1.50", # "cmd_data_port": 56101, "push_msg_ip": "192.168.1.50", # "push_msg_port": 56201, "point_data_ip": "192.168.1.50", # "point_data_port": 56301, "imu_data_ip" : "192.168.1.50", # "imu_data_port": 56401, "log_data_ip" : "", "log_data_port": 56501 } }, "lidar_configs" : [ { "ip" : "192.168.1.158", # also update here "pcl_data_type" : 1, "pattern_mode" : 0, "extrinsic_parameter" : { "roll": 0.0, "pitch": 0.0, "yaw": 0.0, "x": 0, "y": 0, "z": 0 } } ] } -
Build file
~/ws_livox/src/livox_ros_driver2 (master*) » ./build.sh humble -
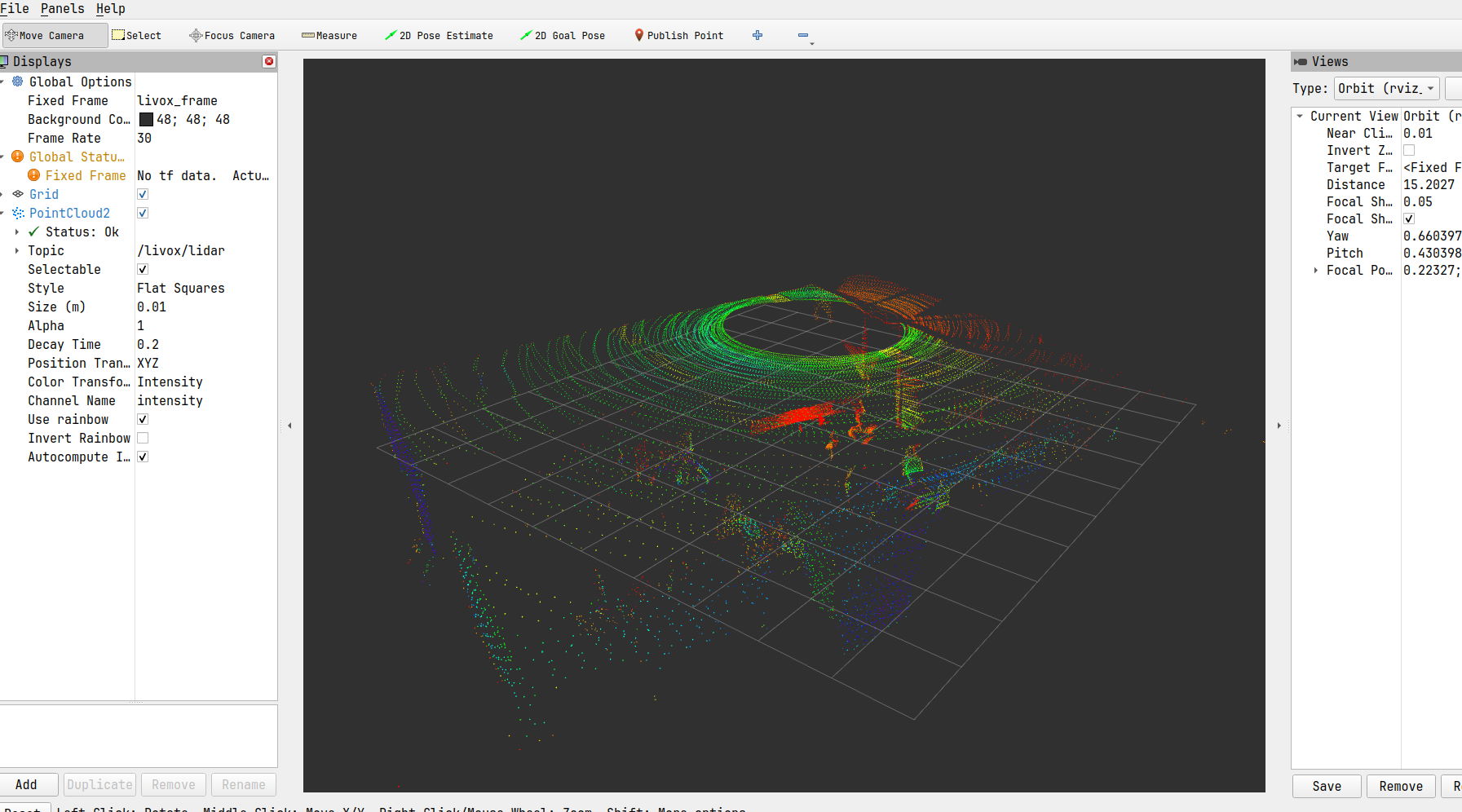
Launch with rviz2
~/ws_livox » source install/setup.zsh~/ws_livox » ros2 launch livox_ros_driver2 rviz_MID360_launch.py
Result
Common Errors
- Livox-SDK2 Need to setup SDK
- When point clouds not showing after all setup, checkout firewall setting for the ports
Tip
- You can also change point clouds publish-frequency(publish_freq = 10.0 / 20.0 / 50.0 …)