3D SLAM - F1Tenth Platform
After F1Tenth Build 3 (3D LiDAR - MID360) and Livox Mid-360 setup, it’s time for 3D SLAM! We tried several approaches, including Kiss-icp, and found that Lidarslam_ros2 works quite well.
To set it up, simply change the /velodyne_points topic to /livox/lidar topic in lidarslam.launch.py:
mapping = launch_ros.actions.Node(
package='scanmatcher',
executable='scanmatcher_node',
parameters=[main_param_dir],
remappings=[('/input_cloud','/livox/lidar'), # velodyne -> livox
('/imu', '/sensors/imu')], # IMU Topic Remapping
)Also, update some parameters in the /param/lidarslam.yaml file, such as scan_period, using_imu, and odom settings.
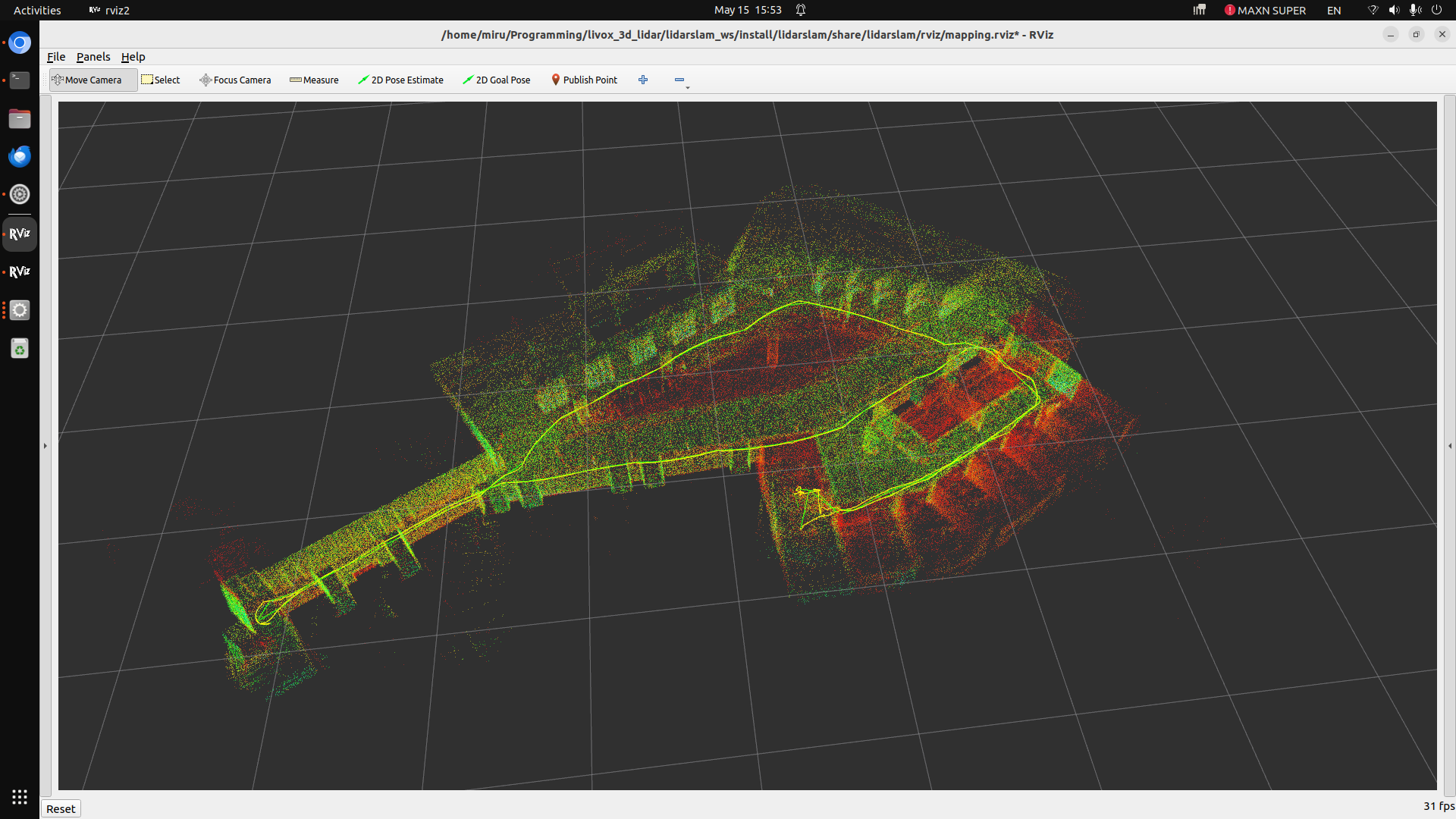
The result is shown below: