Updated F1Tenth(Roboracer) platform with 3D LiDAR
While we build F1Tenth Car with 2D-Hokuyo LiDAR(10LX), we already had this LiDAR from professor. It was luck because obviously Hokuyo was the most expensive components from the F1Tenth Build - Bill of Materials. Since one of other team in our student society, I was helping them. But high cost of sensors was also a burden to them. At that moment we wonder ‘is there any alternative to this sensor?’ Than we found RoboRacer-3DLiDAR from TUM. Looked promising.
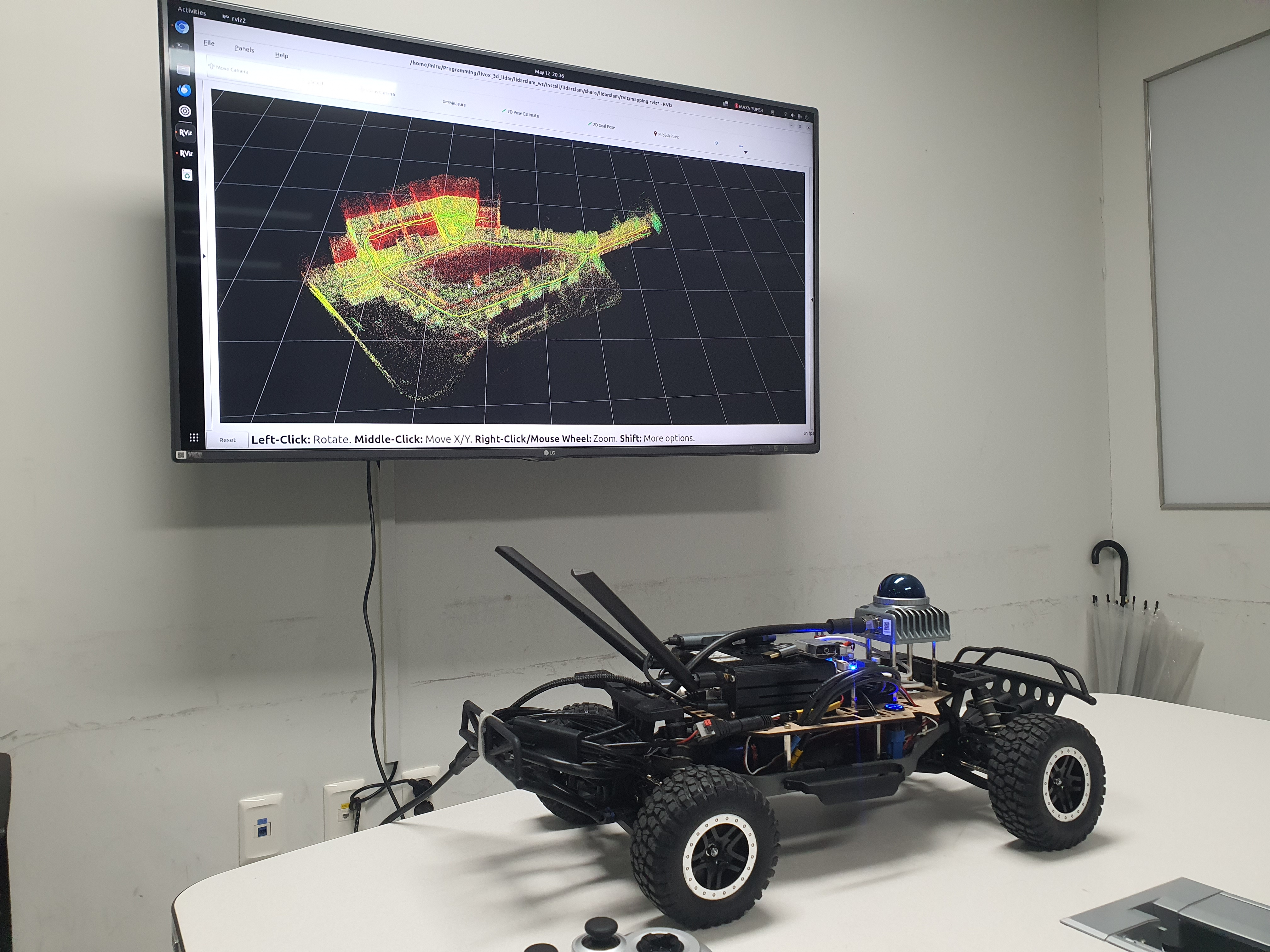
So we updated our car “MiRu Car1” with 3DLiDAR(Livox MID360) and gave Hokuyo LiDAR to “MiRu Car2”